
Objectes multimèdia amb l’etiqueta: Vídeos docents general
Resultats de la cerca

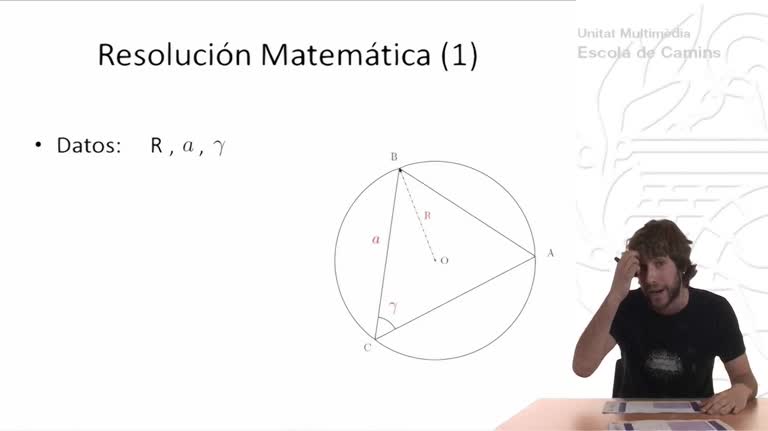
Exercici 1. Diagonalització d'endomorfismes.
Accés obert
1 de febr. 2012
Document audiovisual i pdf explicatiu del Departament d'Estructures a l'Arquitectura. Secció de Matemàtiques i Informàtica.
El video mostra la resolució d'un exercici de diagonalització d'un endomorfisme de R^3.
El video mostra la resolució d'un exercici de diagonalització d'un endomorfisme de R^3.

Exercici 2. Diagonalització d'endomorfismes
Accés obert
1 de febr. 2012
Document audiovisual i pdf explicatiu del Departament d'Estructures a l'Arquitectura. Secció de Matemàtiques i Informàtica.
El video mostra la resolució d'un exercici de diagonalització d'un endomorfisme de R^3.
El video mostra la resolució d'un exercici de diagonalització d'un endomorfisme de R^3.
Restauración el El Rincón de Ademuz
Accés obert
20 de gen. 2012
Presentació de la Jornada a càrrec de Fernando Álvarez Prozorovich, Director del Màster restauració de Monuments, i del conferenciant, Fernando Vegas, arquitecte i professor de la Universitat Politècnica de València.
Aprendiendo a restaurar: un manual de restauración de la arquitectura tradicional de la Comunidad Valenciana.
Accés obert
20 de gen. 2012
Conferència de Camila Mileto i Fernando Vegas, Arquitectes i professors de la Universitat Politècnica de València, per al Màster de Restauració de Monuments, presentats per Fernando Álvarez-Prozorovich, professor del Departament de Composició Arquitectònica de l'ETSAB i Director del Màster.
Mecánica de estructuras de fábrica: teoría y casos de aplicación
Accés obert
20 de gen. 2012
Cloenda a càrrec de Fernando Álvarez-Prozorovich, Director del Màster, i tot seguit conferència de l'Arquitecte Santiago Huerta.

GPS Topcon
Accés obert
1 de gen. 2012
El objetivo de este vídeo es configurar un receptor GPS Topcon para mediciones RTK y VRS.
Projecte subvencionat per "Projectes de Millora de la Docència (PMD) 2008-2009" Universitat Politècnica de Catalunya, realitzat al Departament d'Enginyeria del Terreny, Cartografia i Geofísica de l'EPSEB, amb la col·laboració de les estudiants de l'EPSEB, Jessica Rodríguez Pereira i Nonna Batlles Corominas.
Projecte subvencionat per "Projectes de Millora de la Docència (PMD) 2008-2009" Universitat Politècnica de Catalunya, realitzat al Departament d'Enginyeria del Terreny, Cartografia i Geofísica de l'EPSEB, amb la col·laboració de les estudiants de l'EPSEB, Jessica Rodríguez Pereira i Nonna Batlles Corominas.
SKIPro ajuste
Accés obert
1 de gen. 2012
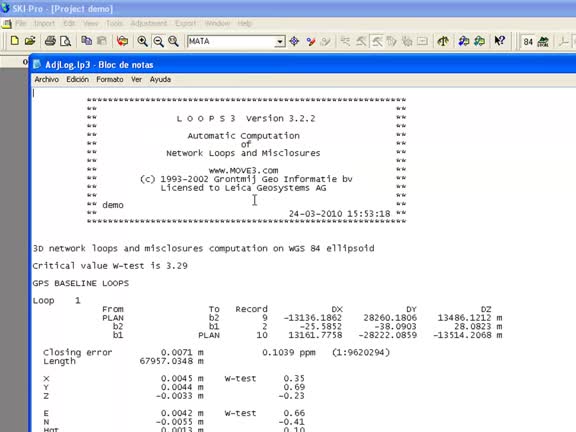
El objetivo de este vídeo es mostrar como ajustar una red observada mediante GPS utilizando el programa SKIPro.
Projecte subvencionat per "Projectes de Millora de la Docència (PMD) 2008-2009" Universitat Politècnica de Catalunya, realitzat al Departament d'Enginyeria del Terreny, Cartografia i Geofísica de l'EPSEB, amb la col·laboració de les estudiants de l'EPSEB, Jessica Rodríguez Pereira i Nonna Batlles Corominas.
Projecte subvencionat per "Projectes de Millora de la Docència (PMD) 2008-2009" Universitat Politècnica de Catalunya, realitzat al Departament d'Enginyeria del Terreny, Cartografia i Geofísica de l'EPSEB, amb la col·laboració de les estudiants de l'EPSEB, Jessica Rodríguez Pereira i Nonna Batlles Corominas.
