
Total de resultats de la cerca: 9110
Resultats de la cerca

L'accés obert segons Martí Rosas
Accés obert
14 d’oct. 2010
Vídeo enregistrat en el marc de la Setmana de l'Accés obert del 18 al 24 d'octubre de 2010.


L'accés obert segons Jordi García Ojalvo
Accés obert
13 d’oct. 2010
Vídeo enregistrat en el marc de la Setmana de l'Accés obert del 18 al 24 d'octubre de 2010

L'accés obert segons Pep Simó
Accés obert
8 d’oct. 2010
Vídeo enregistrat en el marc de la Setmana de l'Accés obert del 18 al 24 d'octubre de 2010

Inauguració del curs acadèmic a l'EPSEVG 2010-2011 : Lliçó inaugural
Accés obert
8 d’oct. 2010
Lliçó inaugural en l'acte d'inauguració del curs acadèmic a l'EPSEVG 2010-2011. La lliçó, que té per títol "Innovando desde Telefónica en el siglo XXI", va anar a càrrec de Pablo Rodríguez Rodríguez, Director de Recerca de Telefónica I+D i professor de la Columbia University a Nova York.
CCT-2010-10-07-Historietes i tecnologia a la dècada dels anys cinquanta
Accés obert
7 d’oct. 2010
La conferència s’emmarca en les activitats que es realitzen a la Càtedra UNESCO de Tècnica i Cultura de la Universitat Politècnica de Catalunya (UPC). La recerca recupera l’anticipació tecnològica apareguda en els anys cinquanta a les publicacions gràfiques de ciència ficció. Els anys cinquanta es coneixen com l’edat d’or dels còmics a Espanya. En la greu penúria de la postguerra, la progressiva normalització de la indústria editorial i l’aparició d’una normativa legal reguladora dels còmics van permetre una extraordinària proliferació de les col·leccions d’historietes, tant en l’àmbit humorístic com en el dramàtic, històric o d’aventures. Els anomenats quaderns d’aventures creaven herois populars que prolongaven setmana rere setmana les interminables històries que esdevenien en un futur proper, en què la tecnologia es convertia en l’instrument imprescindible per a fer versemblants les situacions viscudes pels personatges dels còmics. En les diferents col·leccions apareixen mitjans de transport del futur, noves vies de comunicació, robots, armes o vestits espacials amb una barreja d’ironia i d’anticipació tecnològica, que ara podem mostrar amb la perspectiva que dóna el pas dels anys.
Com difondre a UPCommons el teu Projecte Final de Grau mitjançant les llicències Creative Commons
Accés obert
6 d’oct. 2010
Píndola informativa destinada als estudiants de grau de l'EPSEVG que han de presentar el seu PFG.
Accés obert i les llicències Creative Commons
Accés obert
6 d’oct. 2010
Píndola informativa que explica en què consisteix la filosofia de l'accés obert i les llicències Creative Commons.
El programa inclou l'explicació sobre: Què és l'accés obert, quines declaracions i iniciatives hi ha al respecte, què són les llicències Creative Commons, tipologia i avantatges de les mateixes.
El programa inclou l'explicació sobre: Què és l'accés obert, quines declaracions i iniciatives hi ha al respecte, què són les llicències Creative Commons, tipologia i avantatges de les mateixes.

L'accés obert segons Núria Lupón
Accés obert
6 d’oct. 2010
Vídeo enregistrat en el marc de la Setmana de l'Accés obert del 18 al 24 d'octubre de 2010.

Nervis al box. Alta competició a la Formula Student
Accés obert
5 d’oct. 2010
Creada a la dècada dels vuitanta, Formula Student, se celebra a diferents països gràcies al suport de la indústria de l’automoció i a la passió d’estudiants i professors universitaris i enginyers d’alt nivell. L'objectiu és dissenyar, desenvolupar, construir i conduir un monoplaça d'estil Fórmula 1. Per primer cop a Espanya, el circuit de Montmeló va ser, el passat cap de setmana, l’escenari de la competició entre 15 equips formats exclusivament per estudiants.
Enmig d’un ajustat calendari de proves i verificacions tècniques a Montmeló, dos equips d'estudiants de la UPC han competit amb dos monoplaces d'estil F1 en la Formula Student: ETSEIB Motorsport i UPC ecoRacing. Els membres dels equips de la UPC ens han explicat els aspectes més innovadors dels seus vehicles.
L'ETSEIB Motorsport, de l’Escola Tècnica Superior d’Enginyeria Industrial de Barcelona (ETSEIB), participa per tercer any consecutiu en aquesta competició i que en aquesta edició ho fa amb el CAT03, construït per 23 estudiants. L’altre vehicle de la Politècnica és l’ecoR2, de l’equip UPC ecoRacing, dissenyat per 8 estudiants de l’Escola Tècnica Superior d’Enginyeries Industrial i Aeronàutica de Terrassa (ETSEIAT).
Enmig d’un ajustat calendari de proves i verificacions tècniques a Montmeló, dos equips d'estudiants de la UPC han competit amb dos monoplaces d'estil F1 en la Formula Student: ETSEIB Motorsport i UPC ecoRacing. Els membres dels equips de la UPC ens han explicat els aspectes més innovadors dels seus vehicles.
L'ETSEIB Motorsport, de l’Escola Tècnica Superior d’Enginyeria Industrial de Barcelona (ETSEIB), participa per tercer any consecutiu en aquesta competició i que en aquesta edició ho fa amb el CAT03, construït per 23 estudiants. L’altre vehicle de la Politècnica és l’ecoR2, de l’equip UPC ecoRacing, dissenyat per 8 estudiants de l’Escola Tècnica Superior d’Enginyeries Industrial i Aeronàutica de Terrassa (ETSEIAT).

La influència dels agents externs en l'obertura de rutes marines alternatives
Accés obert
5 d’oct. 2010
Conferència organitzada dins del programa d’activitats del 1r. Premi UPC Barcelona World Race: Innovació, Navegació i Entorn. La conferència duu el títol "La influència dels agents externs en l'obertura de rutes marines alternatives", a càrrec del professor Xavier Martínez de Osés. També es compta amb la xerrada del participant en la World Race amb el vaixell Estrella Damm. sr. Alex Pella, amb el títol "Aprofitament pràctic del vent en una regata oceànica".
Cálculo de un itinerario planimétrico con el programa MDT
Accés obert
1 d’oct. 2010
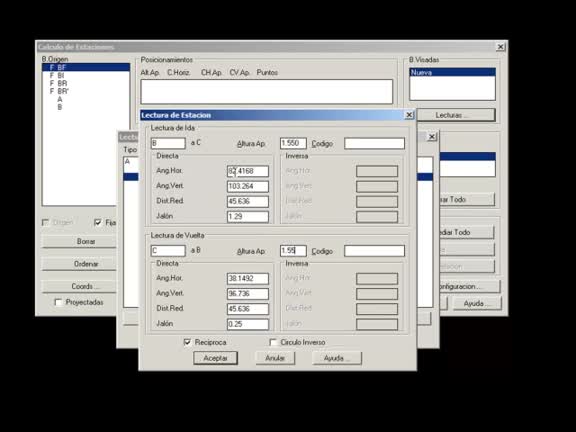
L'objectiu d'aquest vídeo és mostrar com calcular un itinerari planimètric amb el programa MDT v.5.
Projecte subvencionat per "Projectes de Millora de la Docència (PMD) 2008-2009" Universitat Politècnica de Catalunya, realitzat al Departament d'Enginyeria del Terreny, Cartografia i Geofísica de l'EPSEB, amb la col·laboració dels estudiants de l'EPSEB, Jessica Rodríguez Pereira i Marc Garcia Pujol.
Projecte subvencionat per "Projectes de Millora de la Docència (PMD) 2008-2009" Universitat Politècnica de Catalunya, realitzat al Departament d'Enginyeria del Terreny, Cartografia i Geofísica de l'EPSEB, amb la col·laboració dels estudiants de l'EPSEB, Jessica Rodríguez Pereira i Marc Garcia Pujol.
