
Objectes multimèdia amb l’etiqueta: Aplicacions de la informàtica
Resultats de la cerca

Stewart platform
Accés obert
1 de nov. 2015
This project was supported in part by the Spanish Ministry of Economy and Competitiveness under Grant DPI2012-32375-FEDER and by a Grant from Iceland, Liechtenstein and Norway through the EEA Financial Mechanism, operated by Universidad Complutense de Madrid, Spain.
Una plataforma Stewart o robot paral•lel és un mecanisme capaç de simular moviments amb sis graus de llibertat, és a dir, tres moviments lineals i tres de rotacionals. D’aquesta manera es poden reproduir en el laboratori moviments tals como onades, terratrèmols o qualsevol tipus de pertorbació per després fer-hi estudis de control.
Una plataforma Stewart o robot paral•lel és un mecanisme capaç de simular moviments amb sis graus de llibertat, és a dir, tres moviments lineals i tres de rotacionals. D’aquesta manera es poden reproduir en el laboratori moviments tals como onades, terratrèmols o qualsevol tipus de pertorbació per després fer-hi estudis de control.
Desarrollo de una aplicación móvil
Accés obert
15 de maig 2015
Este vídeo forma parte del MOOC "El lenguaje de la Ingeniería" (https://mooc.upc.edu/)
Disseny Assistit per Ordinador. Siemens NX9. Activitat 1 : Assemblatge virtual de peces
Accés obert
17 d’oct. 2014
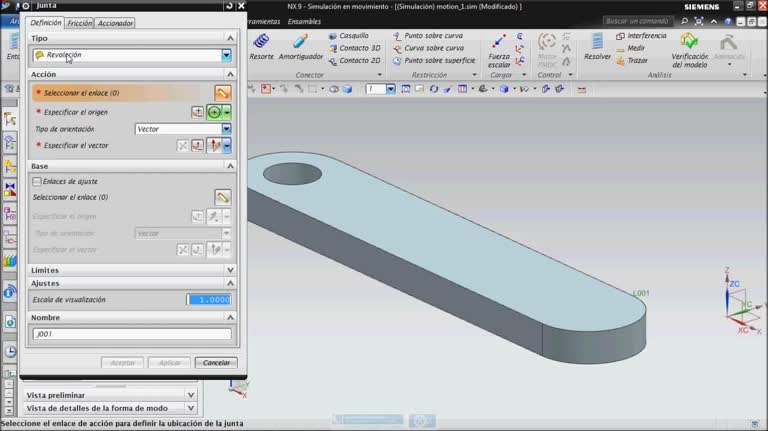
Vídeo demostratiu per a familiaritzar-se amb el programa Siemens NX9. En aquesta activitat s’aprendrà a realitzar un conjunt de peces, creant les restriccions de moviment entre elles adients per a simular el moviment real del assemblatge.
Disseny Assistit per Ordinador. Siemens NX9. Activitat 2 : Creació i assemblatge d'un quadrilàter articulat : Expressions
Accés obert
17 d’oct. 2014
Vídeo demostratiu per a familiaritzar-se amb el programa Siemens NX9. En aquesta activitat et familiaritzaràs amb la funció croquis i podràs practicar algunes aplicacions de la parametrització del disseny (en NX anomenades expressions). Es practicarà també la creació de conjunts. De forma transversal es veurà la llei de Grashof per al quadrilàter articulat.
Disseny Assistit per Ordinador. Siemens NX9. Activitat 3 : Simulació del moviment d'un quadrilàter articulat : Diferents tipus de mecanismes de Grashof
Accés obert
17 d’oct. 2014
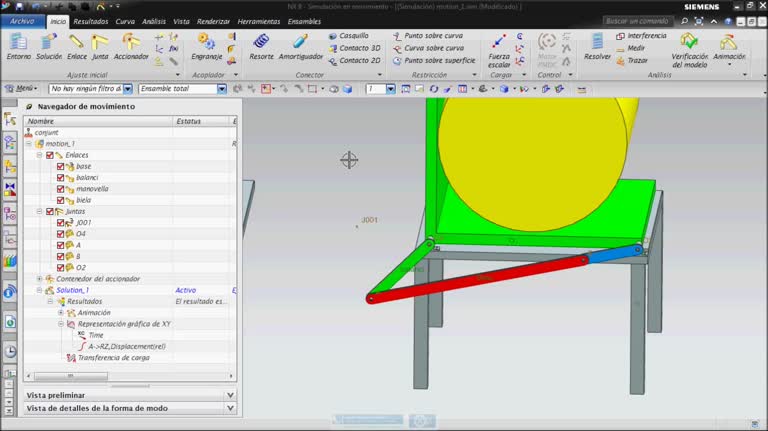
Vídeo demostratiu per a familiaritzar-se amb el programa Siemens NX9. Aquesta activitat t’introdueix en l’aplicació de “Simulació de Moviment”. A partir d’un conjunt de peces sense restriccions es definiran els membres i parells cinemàtics i es conduirà el moviment d’una articulació per tal de donar moviment a un quadrilàter articulat. Es variaran dimensions del mecanisme (mitjançant l’ús d’expressions) dins de cada simulació per tal de simular el moviment de les 3 possibles configuracions d’un quadrilàter de Grashof: manovella-balancí, doble manovella o doble-balancí.
Disseny Assistit per Ordinador. Siemens NX9. Activitat 4: Simulació del moviment d'un quadrilàter articulat : Angle de transmissió i posicions límit : Mecanismes de retorn ràpid
Accés obert
17 d’oct. 2014
Vídeo demostratiu per a familiaritzar-se amb el programa Siemens NX9. S’explica alguns conceptes bàsics de la teoria de màquines com són l’angle de transmissió d’un mecanisme, les posicions estacionàries o d’engarrotament i la relació de temps i els mecanismes de retorn ràpid. En el vídeo s’explica pas a pas com determinar aquests paràmetres amb el NX i després es proposa practicar-ho amb el mecanisme d’un trole manual ferroviari.
Disseny Assistit per Ordinador. Siemens NX9. Activitat 5 : Equilibri d'un mecanisme : simulació i càlcul analític : Forces i moviments d'enllaç : Propietats màssiques d'un sòlid
Accés obert
17 d’oct. 2014
Vídeo demostratiu per a familiaritzar-se amb el programa Siemens NX9. S’explica alguns conceptes bàsics de la teoria de màquines com són els parells cinemàtics i les forces i/o moments d’enllaç que impliquen els diferents tipus de parells. Es simula amb NX un cas molt fàcil d’analitzar analíticament com és una sola barra articulada en el seu extrem a la referència fixa, i s’analitzen i interpreten els resultats de les forces i moments d’enllaç proporcionats pel programa. S’explica com assignar un material en el NX i com obtenir informació sobre les propietats màssiques d’una peça. S’explica breument com realitzar teòricament l’estudi de l’equilibri d’un mecanisme, en concret un quadrilàter articulat.
Vídeo demostratiu per a familiaritzar-se amb el programa Siemens NX9. S’explica alguns conceptes bàsics de la teoria de màquines com són els parells cinemàtics i les forces i/o moments d’enllaç que impliquen els diferents tipus de parells. Es simula amb NX un cas molt fàcil d’analitzar analíticament com és una sola barra articulada en el seu extrem a la referència fixa, i s’analitzen i interpreten els resultats de les forces i moments d’enllaç proporcionats pel programa. S’explica com assignar un material en el NX i com obtenir informació sobre les propietats màssiques d’una peça. S’explica breument com realitzar teòricament l’estudi de l’equilibri d’un mecanisme, en concret un quadrilàter articulat.
Vídeo demostratiu per a familiaritzar-se amb el programa Siemens NX9. S’explica alguns conceptes bàsics de la teoria de màquines com són els parells cinemàtics i les forces i/o moments d’enllaç que impliquen els diferents tipus de parells. Es simula amb NX un cas molt fàcil d’analitzar analíticament com és una sola barra articulada en el seu extrem a la referència fixa, i s’analitzen i interpreten els resultats de les forces i moments d’enllaç proporcionats pel programa. S’explica com assignar un material en el NX i com obtenir informació sobre les propietats màssiques d’una peça. S’explica breument com realitzar teòricament l’estudi de l’equilibri d’un mecanisme, en concret un quadrilàter articulat.
Disseny Assistit per Ordinador. Siemens NX9. Activitat 6 : Esquema cinemàtic del mecanisme
Accés obert
17 d’oct. 2014
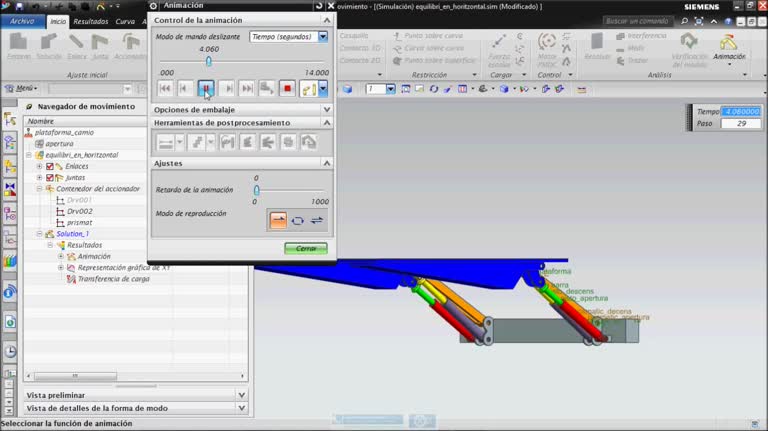
Vídeo demostratiu per a familiaritzar-se amb el programa Siemens NX9. Mitjançant l’estudi del moviment del mecanisme de la plataforma elevadora del darrera d’un camió s’introdueix com definir parells prismàtics amb el NX, com indicar que no es tingui en compte el pes propi dels elements en una simulació, i s’analitza teòricament el cas particular de l’equilibri d’un cos sotmès únicament a dues forces.
Disseny Assistit per Ordinador. Siemens NX9. Activitat 7 : Trencaametlles : Aplicació d'una força : Definició d'una molla : Contacte entre sòlids : Definició funció AFU : Bolcament
Accés obert
17 d’oct. 2014
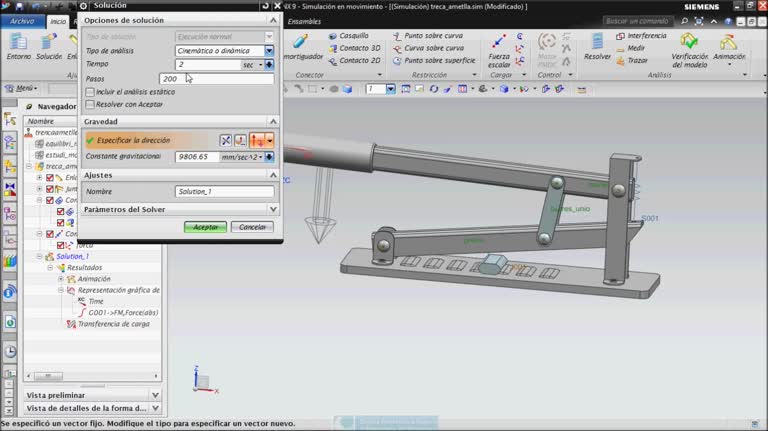
Vídeo demostratiu per a familiaritzar-se amb el programa Siemens NX9. Primerament es realitza l’estudi del mecanisme d’un trencaametlles, mitjançant el qual es mostra pas a pas la definició d’una molla, com s’aplica una força sobre el mecanisme (tant constant com a partir de la definició d’una funció *.AFU), com es defineix el contacte entre sòlids, possibles maneres per poder extreure com a resultat la força que ha de fer un element extern (no modelat) per tal de mantenir l’equilibri del mecanisme. En segon lloc es proposa l’estudi de la pinça d’un robot, on s’ha d’aplicar les funcionalitats vistes anteriorment així com la definició d’un engranatge i l’aplicació d’un moment en una articulació.
Vídeo demostratiu per a familiaritzar-se amb el programa Siemens NX9. Primerament es realitza l’estudi del mecanisme d’un trencaametlles, mitjançant el qual es mostra pas a pas la definició d’una molla, com s’aplica una força sobre el mecanisme (tant constant com a partir de la definició d’una funció *.AFU), com es defineix el contacte entre sòlids, possibles maneres per poder extreure com a resultat la força que ha de fer un element extern (no modelat) per tal de mantenir l’equilibri del mecanisme. En segon lloc es proposa l’estudi de la pinça d’un robot, on s’ha d’aplicar les funcionalitats vistes anteriorment així com la definició d’un engranatge i l’aplicació d’un moment en una articulació.
Vídeo demostratiu per a familiaritzar-se amb el programa Siemens NX9. Primerament es realitza l’estudi del mecanisme d’un trencaametlles, mitjançant el qual es mostra pas a pas la definició d’una molla, com s’aplica una força sobre el mecanisme (tant constant com a partir de la definició d’una funció *.AFU), com es defineix el contacte entre sòlids, possibles maneres per poder extreure com a resultat la força que ha de fer un element extern (no modelat) per tal de mantenir l’equilibri del mecanisme. En segon lloc es proposa l’estudi de la pinça d’un robot, on s’ha d’aplicar les funcionalitats vistes anteriorment així com la definició d’un engranatge i l’aplicació d’un moment en una articulació.


- ← Anterior
- 1 (current)
- Següent →
