
Stewart platform
Accés obert
1 de nov. 2015
57
visualitzacions
Manel Blanes Priego
Francisco Palacios Quiñonero
Josep Maria Rossell Garriga
Josep Rubió Massegú
Jesús Vicente Rodrigo
This project was supported in part by the Spanish Ministry of Economy and Competitiveness under Grant DPI2012-32375-FEDER and by a Grant from Iceland, Liechtenstein and Norway through the EEA Financial Mechanism, operated by Universidad Complutense de Madrid, Spain.
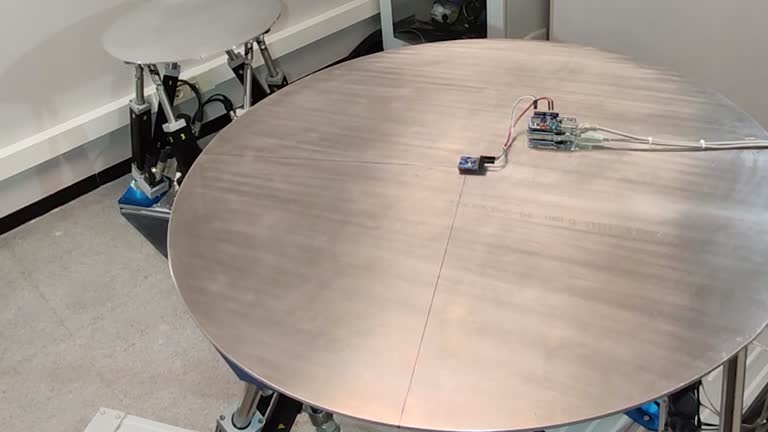
Una plataforma Stewart o robot paral•lel és un mecanisme capaç de simular moviments amb sis graus de llibertat, és a dir, tres moviments lineals i tres de rotacionals. D’aquesta manera es poden reproduir en el laboratori moviments tals como onades, terratrèmols o qualsevol tipus de pertorbació per després fer-hi estudis de control.
Llicència: Reconocimiento-NoComercial-SinObraDerivada 4.0 Internacional (CC BY-NC-ND 4.0)
Sèrie:
EPSEM. Projectes
Vídeos de la mateixa sèrie

Stewart Platform. Path tracking
Accés obert
24 d’abr. 2020
Seguiment de formes de la Plataforma Stewart.

Stewart Platform. Ball and plate vision control
Accés obert
24 d’abr. 2020
Control per visió d'una bola sobre la Plataforma Stewart.

Stewart Platform. Ball and plate touchscreen control
Accés obert
24 d’abr. 2020
Control tàctil d'una bola sobre la Plataforma Stewart.

Steward platform. Synchronized movements of two platforms
Accés obert
24 d’abr. 2020
Moviment sincronitzat de dues plataformes

Stewart Platform. Automatich whiteboard drawing
Accés obert
24 d’abr. 2020
Dibuix amb la Plataforma Stewart.
Stewart Platform. Real-time master-slave synchronization
Accés obert
24 d’abr. 2020
Sincronització en temps real de dues plataformes Master-Slave usant un giroscopi.

Stewart platform
Accés obert
1 de nov. 2015
This project was supported in part by the Spanish Ministry of Economy and Competitiveness under Grant DPI2012-32375-FEDER and by a Grant from Iceland, Liechtenstein and Norway through the EEA Financial Mechanism, operated by Universidad Complutense de Madrid, Spain.
Una plataforma Stewart o robot paral•lel és un mecanisme capaç de simular moviments amb sis graus de llibertat, és a dir, tres moviments lineals i tres de rotacionals. D’aquesta manera es poden reproduir en el laboratori moviments tals como onades, terratrèmols o qualsevol tipus de pertorbació per després fer-hi estudis de control.
Una plataforma Stewart o robot paral•lel és un mecanisme capaç de simular moviments amb sis graus de llibertat, és a dir, tres moviments lineals i tres de rotacionals. D’aquesta manera es poden reproduir en el laboratori moviments tals como onades, terratrèmols o qualsevol tipus de pertorbació per després fer-hi estudis de control.

The making of Qui-Bot H₂O Project
Accés obert
17 de juny 2022
Qui-Bot és un projecte projecte de recerca en innovació docent i divulgació científica que uneix dues disciplines amb potencial de futur i alta demanda de professionals: la química i la programació. Dirigit per Marta Tarrés i Toni Dorado investigadors vinculats al Departament d'Enginyeria Minera, Industrial i TIC (ESPSEM) de la Universitat Politècnica de Catalunya amb la col·laboració de la Fundación Española para la Ciencia y la Tecnología (FECYT) y el Ministerio de ciencia e Innovación. FECYT FCT-20-15626
Objectius de Desenvolupament Sostenible. Una mirada des de l'Enginyeria Mecànica 1: L'Enginyeria Mecànica i la seva relació amb els ODS
Accés obert
2 de juny 2023
Vídeo divulgatiu sobre el paper l'energia en l'Enginyeria Mecànica tenint en compte els Objectius de Desenvolupament Sostenible (ODS). Aquest vídeo és la primera part de la col·lecció "L'enginyeria mecànica i la seva relació amb els ODS" forma part Projecte ECOMEC d'innovació docent. Amb el suport de la Fundació Catalana per a la Recerca i la Innovació (FCRI) (Convocatòria Joan Oró 2022).
Objectius de Desenvolupament Sostenible. Una mirada des de l'Enginyeria Mecànica 2: L'Energia en l'àmbit de l'Enginyeria Mecànica
Accés obert
3 de juny 2023
Vídeo divulgatiu sobre com es tracta el tema energètic en l’àmbit de l'Enginyeria Mecànica en les assignatures dels graus que s'imparteixen des del Departament d’Enginyeria mecànica de la UPC, tenint en compte els Objectius de Desenvolupament Sostenible (ODS). Aquest vídeo és la segona part de la col·lecció "L'enginyeria mecànica i la seva relació amb els ODS" forma part Projecte ECOMEC d'innovació docent. Amb el suport de la Fundació Catalana per a la Recerca i la Innovació (FCRI) (Convocatòria Joan Oró 2022).
Objectius de Desenvolupament Sostenible. Una mirada des de l'Enginyeria Mecànica 3: La recerca en sostenibilitat del grup de recerca Centre de Disseny d'Equips Industrials - Dinàmica de Màquines (CDEI_DM)
Accés obert
3 de juny 2023
Vídeo divulgatiu sobre el paper de l'Enginyeria Mecànica en la recerca sobre l'energia per contribuir en l’assoliment dels Objectius de Desenvolupament Sostenible (ODS). Aquest vídeo és la tercera part de la col·lecció "L'enginyeria mecànica i la seva relació amb els ODS" forma part Projecte ECOMEC d'innovació docent. Amb el suport de la Fundació Catalana per a la Recerca i la Innovació (FCRI) (Convocatòria Joan Oró 2022).
Explicació del funcionament d'una pinça de frè i descripció de les seves peces i el corresponent acoblament
Accés obert
11 d’oct. 2023
Pràctica experimental consistent en el desmuntatge, descripció i anàlisi del funcionament dels diferents components que configuren un conjunt de pinça hidràulica de fre d'un vehicle. Projecte LAB-VIDEO
Determinació experimental de la distribució del temps de residència
Accés obert
10 d’oct. 2023
Resum Pràctica experimental per a l’estudi de la distribució de temps de residència en un reactor tubular. Forma part del projecte LAB-VIDEO
Conversió en un reactor tubular i dependència de la constant de velocitat amb la temperatura
Accés obert
10 d’oct. 2023
Pràctica experimental per a l’estudi de la dependència de la temperatura en la velocitat de la reacció. Forma part del projecte LAB-VIDEO
Seguiment d’una reacció química
Accés obert
10 d’oct. 2023
Pràctica experimental de l’operació en discontinu i l’operació en continu. Forma part del projecte LAB-VIDEO
Banc de proves de Motors Tèrmics
Accés obert
12 d’abr. 2023
Pràctica experimental d'assaig de motors tèrmics en un fre dinamomètric. L'assaig permet l'obtenció de les corbes característiques de parell, potència i consum específic de combustible; així com la determinació del rendiment efectiu del motor. Forma part del projecte LAB-VIDEO
Posada en marxa i funcionament d'un túnel de Vent
Accés obert
11 d’oct. 2023
Preparació del Túnel de Vent i instruccions per a la realització d'una pràctica experimental per a l'obtenció dels coeficients de resistència i de sustentació de diferents cossos i perfils. Forma part del projecte LAB-VIDEO
Explicació del funcionament i les parts d'un embragatge i descripció de les seves peces i el corresponent acoblament
Accés obert
11 d’oct. 2023
Pràctica experimental consistent en el desmuntatge, descripció i anàlisi del funcionament dels diferents components que configuren un conjunt d'embragatge d'un vehicle. Forma part del projecte LAB-VIDEO
Destil·lació batch d’una mescla binària de metilciclohexà i n-heptà en una columna de rebliment
Accés obert
6 d’oct. 2023
Pràctica experimental per a l’estudi de la destil·lació en règim discontinu. Forma part del projecte LAB-VIDEO
Equipament de Reynolds
Accés obert
9 d’oct. 2023
Pràctica experimental per l’estudi dels règims de circulació per canonades. Forma part del projecte LAB-VIDEO
Panell de fluids
Accés obert
9 d’oct. 2023
Pràctica experimental per avaluar la pèrdua de càrrega en un circuit de circulació de fluids al seu pas per diferents accidents i conduccions. Forma part del projecte LAB-VIDEO
