
Objectes multimèdia amb l’etiqueta: Investigació operativa
Resultats de la cerca
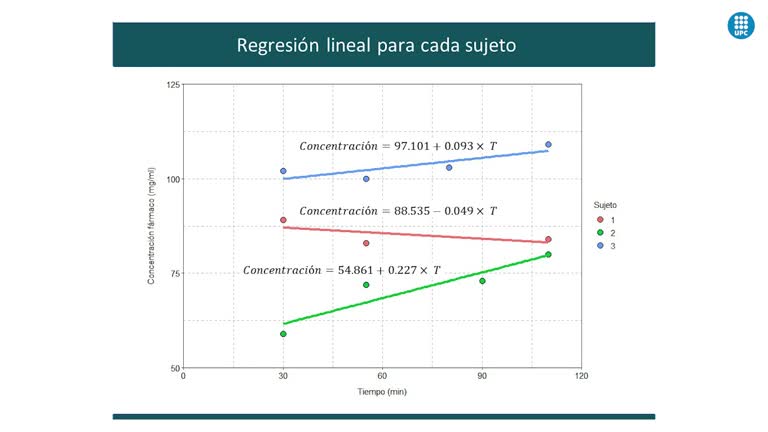
Análisis de Datos Longitudinales
Accés obert
4 de juny 2024
Los modelos estadísticos, como la regresión múltiple, relacionan una variable respuesta cuantitativa con varias variables explicativas. En estudios longitudinales, se observan sujetos a lo largo del tiempo, requiriendo técnicas estadísticas específicas debido a la correlación entre medidas intra-sujeto. Los modelos mixtos, que incluyen efectos fijos y aleatorios, son adecuados para capturar esta variabilidad y proporcionar estimaciones precisas.
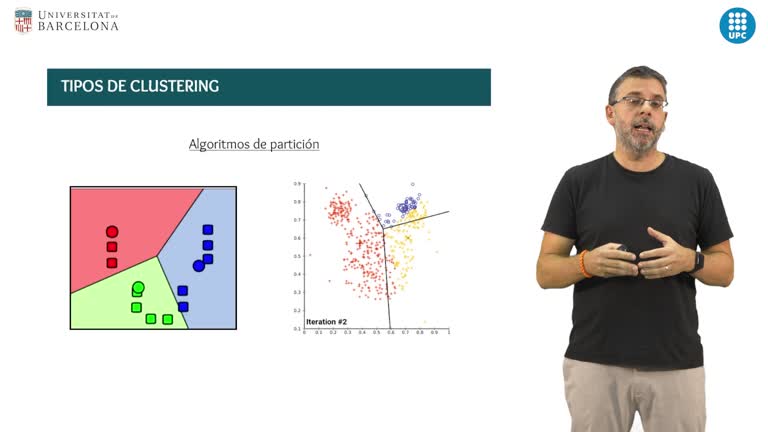
Clustering Agrupando datos similares
Accés obert
16 de nov. 2023
El clustering es una técnica estadística de aprendizaje no supervisado que agrupa datos similares en conjuntos. Sus objetivos son que los objetos de un mismo clúster sean altamente similares entre sí y que los objetos en diferentes clústeres sean altamente disímiles entre sí. Esta técnica es poderosa para agrupar datos en distintos campos de aplicación, aunque diferentes algoritmos pueden producir resultados variados.

Stewart platform
Accés obert
1 de nov. 2015
This project was supported in part by the Spanish Ministry of Economy and Competitiveness under Grant DPI2012-32375-FEDER and by a Grant from Iceland, Liechtenstein and Norway through the EEA Financial Mechanism, operated by Universidad Complutense de Madrid, Spain.
Una plataforma Stewart o robot paral•lel és un mecanisme capaç de simular moviments amb sis graus de llibertat, és a dir, tres moviments lineals i tres de rotacionals. D’aquesta manera es poden reproduir en el laboratori moviments tals como onades, terratrèmols o qualsevol tipus de pertorbació per després fer-hi estudis de control.
Una plataforma Stewart o robot paral•lel és un mecanisme capaç de simular moviments amb sis graus de llibertat, és a dir, tres moviments lineals i tres de rotacionals. D’aquesta manera es poden reproduir en el laboratori moviments tals como onades, terratrèmols o qualsevol tipus de pertorbació per després fer-hi estudis de control.
Problems and challenges in control theory for mechanical systems. Curs Einstein (2004-2005)
Accés obert
16 de març 2005
The topic of geometric control theory is one that makes use of significant mathematical sophistication. This is particularly so when one talks about geometric control theory for mechanical systems, since these systems themselves have a deep and interesting mathematical structure. In this talk, the basic problems of geometric control theory will be introduced. Mechanical examples will be used to illustrate that some of these problems in geometric control theory can be quite subtle and difficult"
- ← Anterior
- 1 (current)
- Següent →
