
Objectes multimèdia amb l’etiqueta: Vídeos docents
Resultats de la cerca
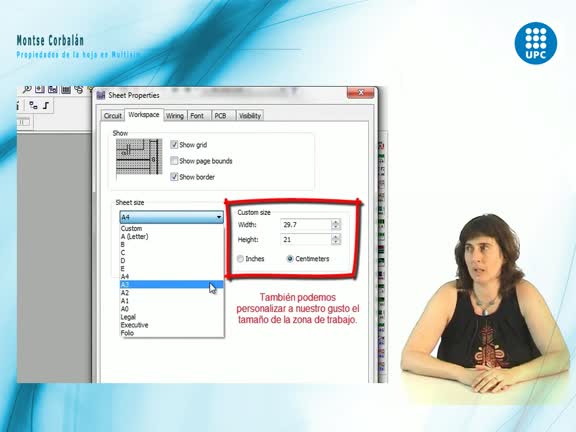
Cómo cambiar las propiedades de la hoja en Multisim
Accés obert
29 de juny 2011
Cómo cambiar las propiedades de la hoja en MultisimMontse Corbalán....

Conferència de clausura
Accés obert
17 de juny 2011
Conferència de clausura de la 7na edició del Máster del Laboratorio de la Vivienda, a càrrec dels Catedràtics del Departament d'Estructures Carles Buxadé i Joan Margarit. Presentats per Josep Maria Montaner, Director del Máster.
Regularity: spectral characterizations. (Advanced course eigenvalue techniques in graph theory)
Accés obert
16 de juny 2011

01. Maquetes. Urbanistica II-M
Accés obert
14 de juny 2011
Presentació de les maquetes de l'assignatura Urbanistica II-Matí. Els professors responsables: Maria Rubert de Ventós; Marta Bayona; Alejandro Giménez; Mario Jiménez; Jordi Sardà i Josep Maria Solé.
Perfect matchings. (Advanced course eigenvalue techniques in graph theory)
Accés obert
14 de juny 2011
More interlacing for the adjacency matrix. (Advanced course eigenvalue techniques in graph theory)
Accés obert
9 de juny 2011
Introduction to graph spectra. (Advanced course eigenvalue techniques in graph theory)
Accés obert
7 de juny 2011
